Sensors, Free Full-Text
Por um escritor misterioso
Last updated 22 setembro 2024
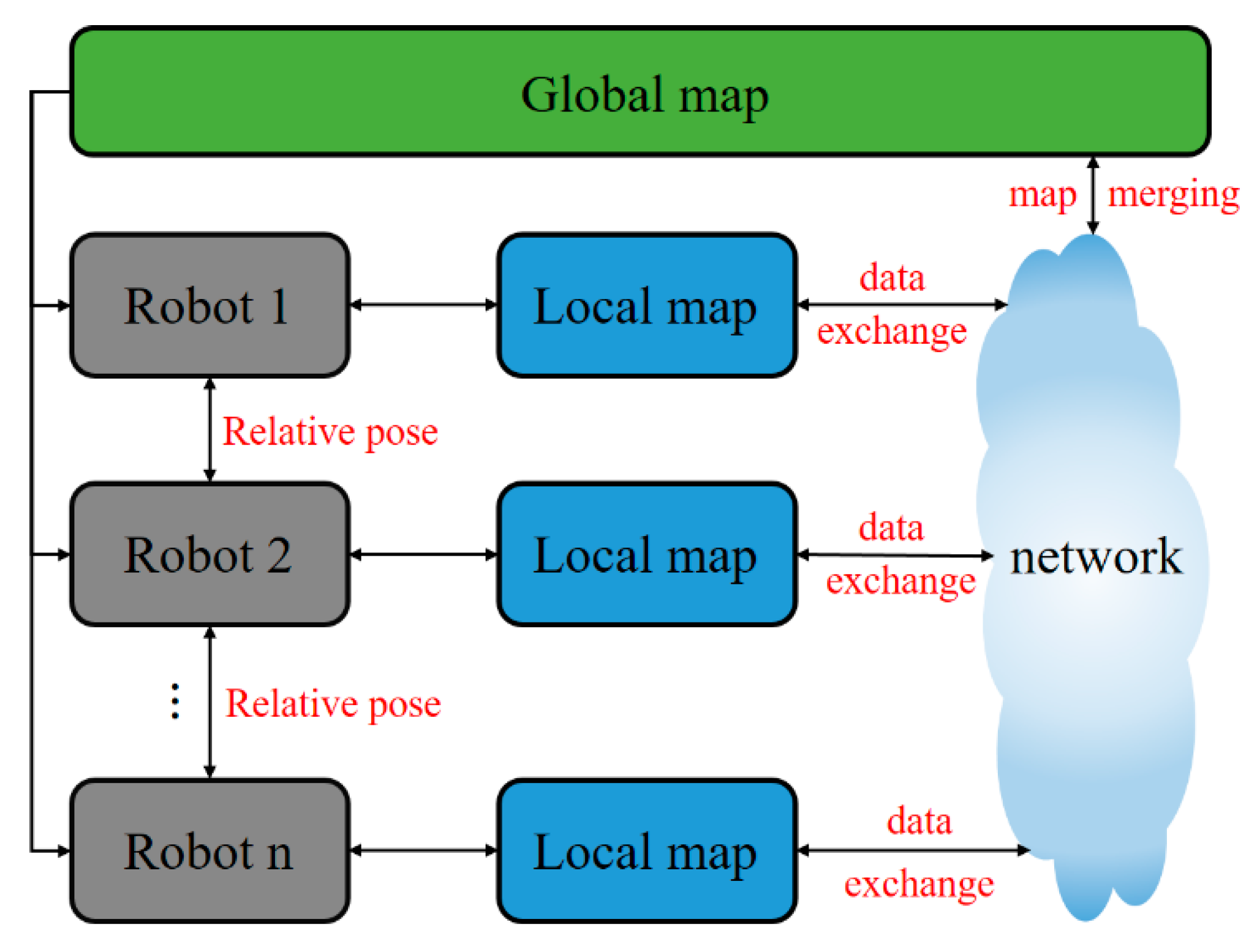
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

buy Bosch Fuel Pressure Sensor 0261230093 3F2Z9G756AA for Ford E
Sensors for Pressure Mapping and Force Measurement

KEYENCE LRW500 Full-Spectrum Sensor for sale online

Sensors, Free Full-Text
Tekscan Technology

Advanced Science - Wiley Online Library

System Sensor HVAC Product Overview

Battery-free, wireless sensors for full-body pressure and
Sensors for Pressure Mapping and Force Measurement
TEKSCAN Pressure Mapping / Force Measurement / Tactile Sensor 3000
Buy FreeStyle Libre 3 Sensor Online - Continuous Glucose
Recomendado para você
-
 MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA22 setembro 2024
MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA22 setembro 2024 -
 DESMAIEI NO MEIO DO JOGO!22 setembro 2024
DESMAIEI NO MEIO DO JOGO!22 setembro 2024 -
 MINECRAFT #22. PRIMEIRAS CONSTRUÇÕES DA NOSSA NOVA CIDADE MODERNA22 setembro 2024
MINECRAFT #22. PRIMEIRAS CONSTRUÇÕES DA NOSSA NOVA CIDADE MODERNA22 setembro 2024 -
chika gadando os civil #fivemrp #grotarp #complexorp @_22 setembro 2024
-
 Novo guia londres 2012 small 3 by Luis Ventura - Issuu22 setembro 2024
Novo guia londres 2012 small 3 by Luis Ventura - Issuu22 setembro 2024 -
Colégio Toth Ribeirão Pires SP22 setembro 2024
-
 Dúvida Animal Por que abelhas morrem quando picam? - Jornal Joca22 setembro 2024
Dúvida Animal Por que abelhas morrem quando picam? - Jornal Joca22 setembro 2024 -
 ROBLOX - DESAFIO DAS SETINHAS NO TOWER OF HELL!!!22 setembro 2024
ROBLOX - DESAFIO DAS SETINHAS NO TOWER OF HELL!!!22 setembro 2024 -
 ROBLOX - DESAFIO ACERTE O DESENHO #222 setembro 2024
ROBLOX - DESAFIO ACERTE O DESENHO #222 setembro 2024 -
:strip_icc()/i.s3.glbimg.com/v1/AUTH_59edd422c0c84a879bd37670ae4f538a/internal_photos/bs/2016/x/T/D8BVynSQuC0e4Kh1qreQ/29615120441-8d68294883-k.jpg) UnB divulga lista de aprovados no PAS 2018; veja nomes e22 setembro 2024
UnB divulga lista de aprovados no PAS 2018; veja nomes e22 setembro 2024


você pode gostar
-
 Conjunto De Modelos De Banner De Jogo De Xadrez Vetor De Estoque Ilustração do Vetor - Ilustração de vetor, cartaz: 21187059422 setembro 2024
Conjunto De Modelos De Banner De Jogo De Xadrez Vetor De Estoque Ilustração do Vetor - Ilustração de vetor, cartaz: 21187059422 setembro 2024 -
 Vnc Vanitas GIF - VNC VANITAS VANITAS NO CARTE - Discover & Share GIFs22 setembro 2024
Vnc Vanitas GIF - VNC VANITAS VANITAS NO CARTE - Discover & Share GIFs22 setembro 2024 -
korblox mahal - Roblox22 setembro 2024
-
 EDENS ZERO Site oficial da Netflix22 setembro 2024
EDENS ZERO Site oficial da Netflix22 setembro 2024 -
 YBA Skins Value Tier list 2023 (Best Skins Values)22 setembro 2024
YBA Skins Value Tier list 2023 (Best Skins Values)22 setembro 2024 -
 P.C. Cast Quote: “Well, he was wearing those really bad pants ant22 setembro 2024
P.C. Cast Quote: “Well, he was wearing those really bad pants ant22 setembro 2024 -
 Construtores de Casas no Bloxburg - Dinheiro do Bloxburg para Comprar Online, Fiverr22 setembro 2024
Construtores de Casas no Bloxburg - Dinheiro do Bloxburg para Comprar Online, Fiverr22 setembro 2024 -
 Conta roblox premium brookhaven com - Roblox - Outros jogos Roblox22 setembro 2024
Conta roblox premium brookhaven com - Roblox - Outros jogos Roblox22 setembro 2024 -
 Ranking EVERY Fnaf Plush Ever Made! - 2023 Complete Fnaf22 setembro 2024
Ranking EVERY Fnaf Plush Ever Made! - 2023 Complete Fnaf22 setembro 2024 -
 Assassin's Creed Odyssey 4K Wallpaper For PC22 setembro 2024
Assassin's Creed Odyssey 4K Wallpaper For PC22 setembro 2024
