TORCS Dataset Papers With Code
Por um escritor misterioso
Last updated 21 dezembro 2024

TORCS (The Open Racing Car Simulator) is a driving simulator. It is capable of simulating the essential elements of vehicular dynamics such as mass, rotational inertia, collision, mechanics of suspensions, links and differentials, friction and aerodynamics. Physics simulation is simplified and is carried out through Euler integration of differential equations at a temporal discretization level of 0.002 seconds. The rendering pipeline is lightweight and based on OpenGL that can be turned off for faster training. TORCS offers a large variety of tracks and cars as free assets. It also provides a number of programmed robot cars with different levels of performance that can be used to benchmark the performance of human players and software driving agents. TORCS was built with the goal of developing Artificial Intelligence for vehicular control and has been used extensively by the machine learning community ever since its inception.

LayoutBench Dataset
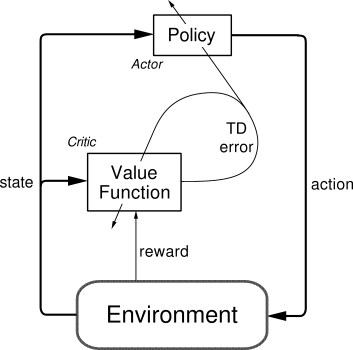
Using Keras and Deep Deterministic Policy Gradient to play TORCS

Pseudo-code of dynamic scheduling framework with grouped whales (DSF.GW)
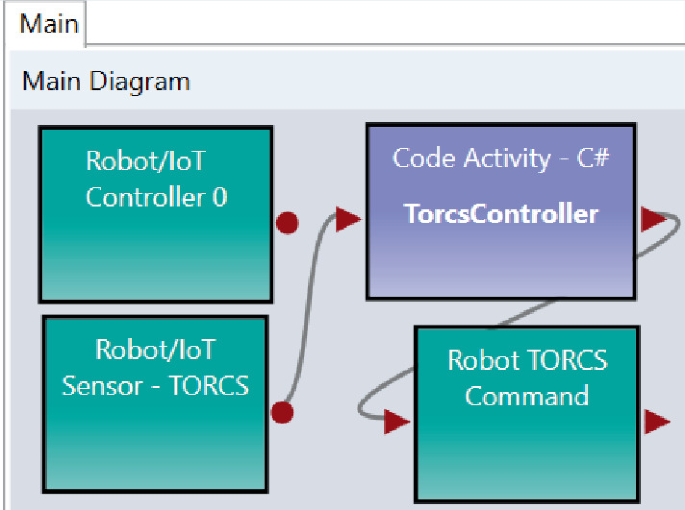
Traffic Simulation and Autonomous Driving Experiment in VIPLE
Martin Bauw (@BauwM) / X
Information, Free Full-Text
deep-autonomous-driving-papers/README.md at master · daviddao/deep-autonomous-driving-papers · GitHub

Martin Bauw (@BauwM) / X
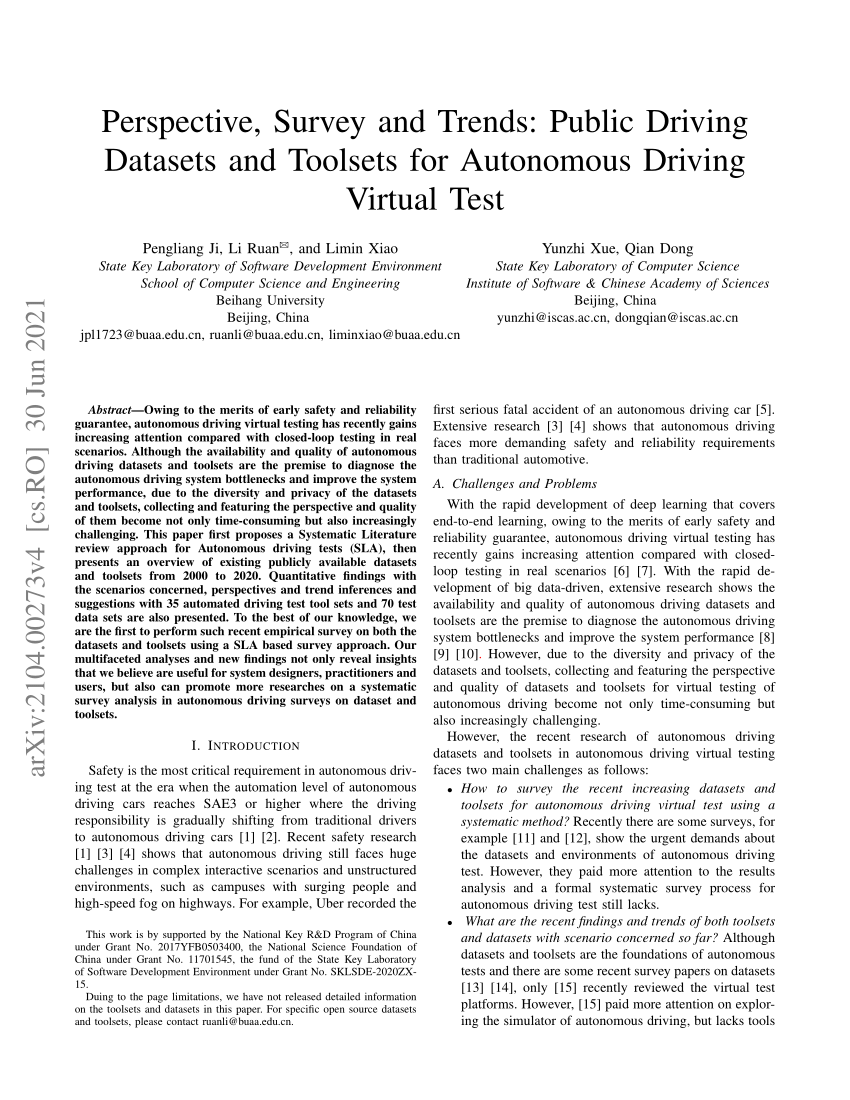
PDF) Perspective, Survey and Trends: Public Driving Datasets and Toolsets for Autonomous Driving Virtual Test

Deep_Reinforcement_Learning_for_Autonomous_Driving_A_Survey
Recomendado para você
-
Open World Car Driving Games - Apps on Google Play21 dezembro 2024
-
 Starting Guide to Driving Simulator, Driving Simulator Wiki21 dezembro 2024
Starting Guide to Driving Simulator, Driving Simulator Wiki21 dezembro 2024 -
 Driving Empire Codes (December 2023) - Roblox21 dezembro 2024
Driving Empire Codes (December 2023) - Roblox21 dezembro 2024 -
 Money Race codes for December 202321 dezembro 2024
Money Race codes for December 202321 dezembro 2024 -
 Nocturne Entertainment on X: 🎉You can now redeem five keys in21 dezembro 2024
Nocturne Entertainment on X: 🎉You can now redeem five keys in21 dezembro 2024 -
 NEW* ALL WORKING CODES FOR MERGE RACE SIMULATOR IN 2023! ROBLOX MERGE RACE SIMULATOR CODES21 dezembro 2024
NEW* ALL WORKING CODES FOR MERGE RACE SIMULATOR IN 2023! ROBLOX MERGE RACE SIMULATOR CODES21 dezembro 2024 -
 Merge Race Simulator codes21 dezembro 2024
Merge Race Simulator codes21 dezembro 2024 -
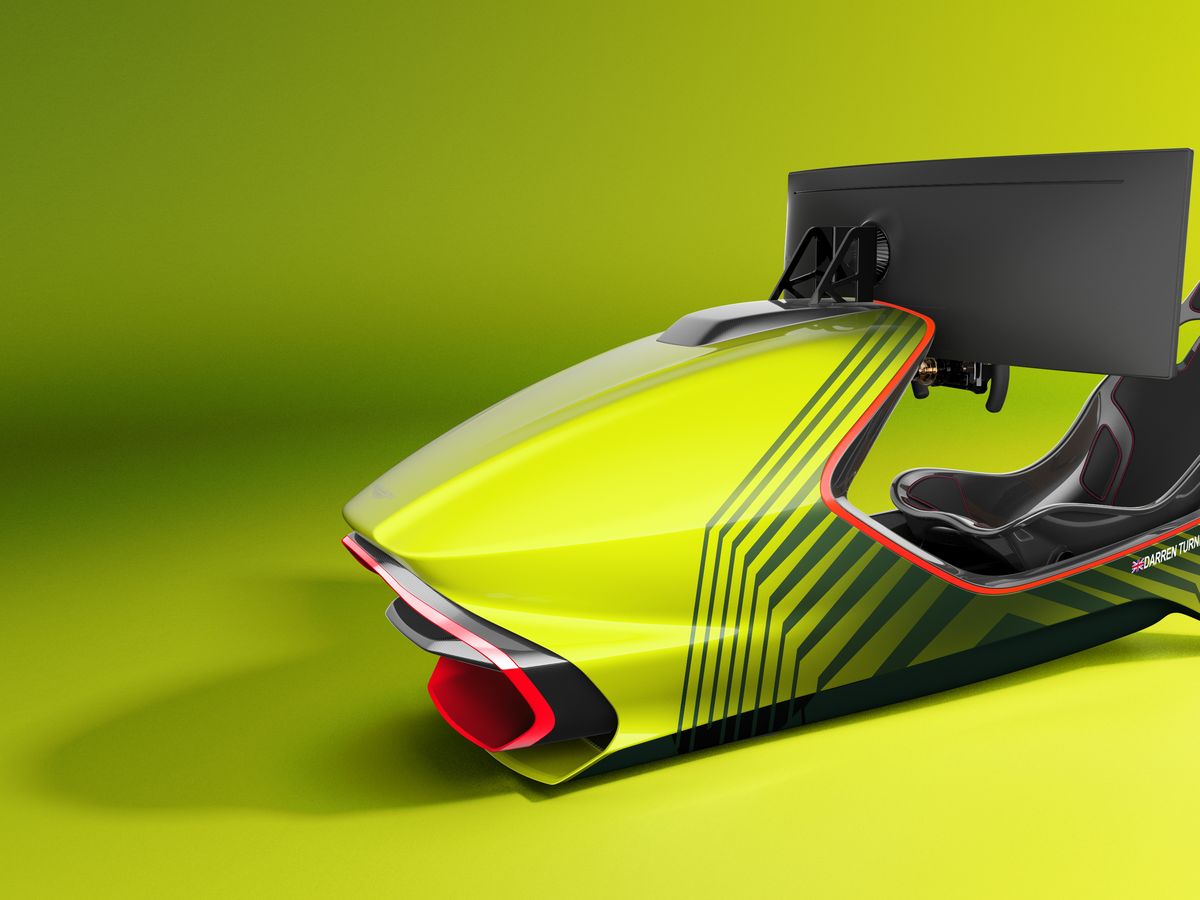 We Tried Aston Martin's $80,000 Curved-Screen Racing Simulator21 dezembro 2024
We Tried Aston Martin's $80,000 Curved-Screen Racing Simulator21 dezembro 2024 -
 RACE 🚚TRUCKS VS CARS🚗 - Fortnite Creative Map Code - Dropnite21 dezembro 2024
RACE 🚚TRUCKS VS CARS🚗 - Fortnite Creative Map Code - Dropnite21 dezembro 2024 -
 Merge Race Simulator Codes December 2023 - RoCodes21 dezembro 2024
Merge Race Simulator Codes December 2023 - RoCodes21 dezembro 2024

você pode gostar
-
 Warner Bros confirm release dates for Blue Beetle, Last Train To New York & Toto for 2023 : Bollywood News - Bollywood Hungama21 dezembro 2024
Warner Bros confirm release dates for Blue Beetle, Last Train To New York & Toto for 2023 : Bollywood News - Bollywood Hungama21 dezembro 2024 -
 Pin em Gramática inglesa21 dezembro 2024
Pin em Gramática inglesa21 dezembro 2024 -
 ONE PIECE: A Série, Trailer oficial21 dezembro 2024
ONE PIECE: A Série, Trailer oficial21 dezembro 2024 -
 Jurassic World Evolution - Carnivore Dinosaur Pack DLC Steam CD21 dezembro 2024
Jurassic World Evolution - Carnivore Dinosaur Pack DLC Steam CD21 dezembro 2024 -
 Mesa de jantar com sinuca e design de alto padrão21 dezembro 2024
Mesa de jantar com sinuca e design de alto padrão21 dezembro 2024 -
 Receita em PDF Traduzida - Smurf21 dezembro 2024
Receita em PDF Traduzida - Smurf21 dezembro 2024 -
 Pin on All star fighters21 dezembro 2024
Pin on All star fighters21 dezembro 2024 -
 Thinking Meme Robert - ROBERT PLANTERS - LITTLE PEOPLE PLANTERS21 dezembro 2024
Thinking Meme Robert - ROBERT PLANTERS - LITTLE PEOPLE PLANTERS21 dezembro 2024 -
 Rage of Sparta from 'God of War III' Guitar Tab in D Minor - Download & Print - SKU: MN020468421 dezembro 2024
Rage of Sparta from 'God of War III' Guitar Tab in D Minor - Download & Print - SKU: MN020468421 dezembro 2024 -
 SAIU! NOVA VERSÃO 1.20 OFICIAL DO MINECRAFT PE!!21 dezembro 2024
SAIU! NOVA VERSÃO 1.20 OFICIAL DO MINECRAFT PE!!21 dezembro 2024